レッスン 2: ILS アプローチ
さあ、準備はいいですか? 着陸は楽しいと思っているなら、ILS (計器着陸装置) アプローチに病みつきになるのは時間の問題です。これについては概要で少し説明しましたが、ここではさらに詳しく説明します。ILS アプローチは航空機の操縦の中で、最も困難で、かつ最も達成感のあるものの 1 つです。
ILS アプローチでは、垂直方向と水平方向の電子的な誘導を受けて、滑走路に降下します。 これは、計器パネルの ILS ディスプレイにある 2 つの指針 (図 2-1) を見ながら行います。

この方法では、他の計器進入とは異なり、決心高度 (DH) と呼ばれる高度まで誘導に従って降下します。DH は、図 2-2 に示すとおり、滑走路高度の約 200 フィート上です。

この比較的低い位置から、パイロットは機外を見て、着陸できる程度に滑走路を見通せるかどうか判断を下します。このため、この位置を “決心高度” と呼ぶのです。滑走路の視界が悪く、安全に着陸できないと思ったら、出力を上げて上昇し、天候の良い他の目的地に向かいます。では、ILS アプローチをもっと具体的に観察してみることにしましょう。
ILS は 2 本の電波ビームから成ります。図 2-3 のように、一方のビームは滑走路を中心に左右に広がり、もう一方は上に向かって広がっています。
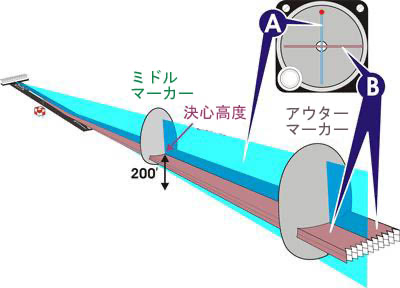
左右に広がるビームを、ローカライザと呼びます。このビームは、航空機を滑走路の延長線上に合わせるためにあります。図 2-3 の A の位置に針がくるようにすれば、ローカライザに沿って飛行できます。針が右に振れていれば右に進み、左に振れていれば左に進めばよいのです。針が中心にあれば、機体は滑走路のセンターラインに沿って進んでいることになります。 無風状態であれば、滑走路の方位に機体を向けるだけで、ローカライザの針を中心に保つことができます。風がある場合は、風による偏流を補正するため、少しだけ方向を修正する必要があります。聞いていると簡単そうですが、完璧に行うためには練習が必要です。
グライド スロープは、上向きに約 3 度の角度が付けられている電波ビームです (図 2-3)。 グライド スロープの針を図 2-3 のように中心に合わせると、滑走路に向かう障害物のないコースを飛行できます。では、グライド スロープの針を中心に保つには、どうすればよいのでしょうか。ローカライザと同じく、針が振れている側に航空機を向ければよいのです。針が上に振れたら機首を上に向け、下に振れたら下に向けます。目的は、特定の降下率を維持しながら、航空機を DH までグライド スロープに沿って降下させることにあります。
定率降下
ILS アプローチを一般的な速度 90 ノットで行う場合、グライド スロープに沿って飛行するには毎分 500 フィート (fpm) で降下する必要があります。当然、アプローチ速度を速くするのであれば、降下率も上げる必要があります。グライド スロープの針を中央に保って正確な降下率で降下するには、グライド スロープ角度と風という 2 つの要因の影響を考慮しなければなりません。
90 ノットで、500 fpm という一定の降下率で降下するとしましょう (これは、ILS アプローチにおける一般的な降下率です)。では、どのようにして行えばよいのでしょうか。まず、出力を現在の設定から 1,600 rpm まで下げ、機首が自然に少し下がるようします。降下率 500 fpm を維持するように、必要に応じてピッチを調整し、対気速度 90 ノットを維持するように出力を調整します。お気付きかもしれませんが、前のレッスンで学んだ方法とは、調整する操作が入れ替わっています。 このように操縦装置を使用すると、ILS アプローチに必要な降下率を正確に制御できるのです。
では、試してみましょう。
- 水平飛行で 90 ノットを維持するように出力を調整します。
90 ノットで水平飛行するには、約 6 度の機首上げ姿勢にする必要があります。 - 出力を 1,600 rpm まで下げると、機首が自然に下を向くので、ピッチを調整して 500 fpm の降下率を維持します。
この場合、水平儀 (AI) で約 3 度の機首上げ姿勢になるはずです。 - この降下率での姿勢を維持するようにトリムを調節します。
- 90 ノットを維持するように出力を微調整します。
航空機には慣性があるので、スロットルを動かしてから速度が変化するまでに数秒の遅れがあります。辛抱が肝心です。
信じられないかもしれませんが、これがグライド スロープをインターセプトするときの操作です。グライド スロープは通常、下の方からインターセプトします。ILS ディスプレイの針が下がってきて中心に来るまで (図 2-4)、90 ノットで水平飛行してください。

針が中心まで来たら、出力を約 1,600 rpm まで下げ、ピッチを調整して、90 ノットを維持したまま 500 fpm の降下率で降下するようにトリムを調節します。完全に調和がとれていれば、航空機は決心高度までグライド スロープにぴったり沿って降下するはずです。 しかし、そうはいかないのが人の世の常です。 そこで、グライド スロープの指針を中心に保つためには、降下率を少し変えてやる必要がでてきます。 では、その方法を見てみましょう。
現在の高度がグライド スロープよりも高いので、グライド スロープに合わせるために、降下率を大きくしなければなりません。500 fpm から 700 fpm に降下率を変更する場合は、図 2-5 のように 3 度の機首下げ姿勢にする必要があります。

対気速度 90 ノットを維持するため、出力も下げる必要があります。一定の降下率を保つ秘訣は、VSI の針を追いかけないことです。AI で航空機の姿勢を正確に維持し、ジョイスティックに加える力をわずかずつ変えて、降下率を調整します。
ここで、正しくグライド スロープに乗れたので、降下率を 500 fpm に戻すとします。それには、3 度の機首上げ姿勢にして、出力を約 1,600 rpm まで上げます。
今度は、グライド スロープの下に出てしまったので、降下率を下げてグライド スロープに戻りたい場合です。図 2-6 のようにピッチを水平にして、500 fpm から 300 fpm に降下率を変更します。

対気速度 90 ノットを維持するため、出力を約 1,700 rpm に上げます。
VSI の針の動きに振り回されないようにしてください。AI でピッチを変えてから、ジョイスティックに加える力をわずかずつ調整して、VSI の指示に合わせます。
主要飛行計器のラジアル スキャン
ILS アプローチで、居眠りは許されません。DH まで ILS の 2 本の指針を追いかけ続けるのは、かなり骨の折れる仕事です。3 ステップの計器スキャンのうち、ステップ 2 が欠かせないのはこのためです。別の言い方をすれば、降下率を一定に保つために、ILS アプローチ中はほとんどずっと主要飛行計器のラジアル スキャンを続けることになります。図 2-7 は ILS アプローチで使う主要飛行計器です。

主にピッチは昇降計 (VSI) で、バンクは定針儀 (HI) で、出力は対気速度計 (ASI) で確認してください。これらの計器を、ILS ディスプレイと同時にラジアル スキャンします (ただし、対気速度計はそれほど頻繁にスキャンしなくても大丈夫です)。つまり、ILS アプローチのときはこの 3 つの主要飛行計器は継続的にラジアル スキャンしますが、他の計器はときどきスキャンする程度でかまいません。 計器スキャンの最終ステップでのモニタ スキャンの方が、はるかに忙しいです。
また、すべてのグライド スロープが同じように作られているわけではありません。角度が異なるものもあります。 したがって、グライド スロープごとに異なる降下率にしなければならない場合があります。図 2-8 は、アプローチ時にさまざまな角度のグライド スロープに沿って飛行するための、降下率と対地速度の関係を示しています。
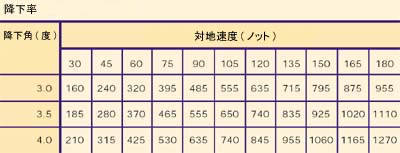
3 度のグライド スロープの場合、90 ノットで降下すれば降下率は 485 fpm となり、ターゲットにどんぴしゃり、というわけです。
さあ、やってみましょう。ローカライザに沿って飛行するのが難しければ、正面の滑走路を見ながら航空機の向きを合わせてください。実際の滑走路を見ながらだと、方向を維持するのは簡単です。なぜでしょうか。それは、目前に広がる映像から、ピッチ、バンク、それに滑走路の延長線上にいるかどうかという情報が得られるからです。外の景色が見えないとなると、3 種類の計器から同様の情報を手に入れるには、熟練した計器スキャン技能が必要になります。AI (水平儀)、HI (定針儀)、ILS ディスプレイを交互に見張らなければならないのです。
秘訣を少々
これで ILS アプローチの基礎は理解できたと思います。ここからは、プロの知識です。まず、ラジアル スキャンで最も重要な計器は、HI (定針儀) と VSI (昇降計) です。対気速度計と ILS ディスプレイは、毎回ラジアル スキャンする必要はありません。実際には、対気速度計のラジアル スキャンは、HI と VSI を 10 回スキャンするたびに 1 回行う程度で十分でしょう。ILS ディスプレイのラジアル スキャンも、HI と VSI を 3 回スキャンするたびに 1 回行う程度に省略してかまいません。もちろん、高度計やエンジン回転計、その他の計器も、時間があれば確認してもよいでしょう。ILS のトラッキングに必要な針路と降下率がわかったら、その数値を変更する必要がない限りは、正確に守るようにします。くれぐれも正確にです。優秀な計器パイロットは、針路を 1 度単位、降下率をプラス マイナス 25 fpm で維持することができます。ウソではありません。ただし、この腕前になるまでには、かなりの練習が必要です。
乱気流の中では、針路や VSI の表示がまったく定まらなくなることもしばしばです。そのような状況では、平均値を読み取るのが一番です。ピッチとバンクの制御をむしろ AI (水平儀) を基準に行うようにします。目標とする降下率におおよそ合ったピッチ姿勢を見つけます。AI を確認しながら、そのピッチ姿勢と主翼の水平を保って飛行します。
さらに、シミュレータの操縦では、わずかに、しかしとっさにジョイスティックを操作しなければならない場合があります。本物の航空機と違って、シミュレータでは操縦装置から伝わる力の変化を感じることができません。そのため、姿勢の変化を予測することができないのです。 また、航空機には、方向を細かく調整できるラダーがあります。シミュレータに接続できるラダーを持っていない場合もあるでしょう。その場合は、航空機を正しい姿勢に維持するために、細かくすばやいジョイスティック操作が必要になることがあります。ラダー ペダルまたはラダー機能のついたジョイスティックがある場合は、やさしくスムーズに動かすようにします。
ローカライザ上での偏流修正
自分の部屋をもっと広くしてほしい、と父に初めてお願いしたのは 10 代のころでした。すると父は、私を家から締め出して、「これで広い部屋が手に入っただろう」と言いました。まさにそのとき、私はフィードバックの威力を理解したのです。フィードバックによって、私の振る舞いは変わりました。きっとあなたも変わることでしょう。ローカライザの飛行については、特にそうなるでしょう。
ILS 飛行を始めるときは、機首をローカライザの方向に向けます。Oakland (オークランド) の場合、ローカライザ方位は 294 度です。294 度に機首を向けて飛行し、針の動きを観察しましょう。ここでは、ローカライザの針の動きという形のフィードバックを待っているのです。もっと具体的に言うと、294 度の針路を維持して飛行しているときに、針が左右どちらに、どれだけ振れるかを知りたいのです。
ローカライザの針の動きは、2 つのことを教えてくれます。それは風向きと風速です。風速は、針の動きの速さから判断できます。針が中心位置から水平方向に 1 目盛りずれたら、5 ~ 10 度の交差角 (IA: インターセプト アングル) で中心に戻します。修正が大きくなりすぎないように、小さな交差角で修正します。10 度の交差角でも、針が中心に戻らなかったり、中心からますます離れていく場合は、当然もっと大きな交差角が必要になります。また、この場合はローカライザ上に再び乗ったら、10 度以上の偏流修正角が必要になることを忘れないでください。
ローカライザの針が中心に戻ったら、少し横風補正をしましょう。風をできるだけ正確に読んで、1 度、5 度、10 度などの偏流修正角 (WCA) を試してください。WCA が決まったら、ローカライザの針を見張ります。指針が中心に戻っていくようであれば、WCA は、WCA とローカライザの方向の間の角度だとわかります。
たとえば、Oakland のローカライザをインターセプトしたときに、294 度の針路で飛行していたとします。数秒のうちに、ローカライザの指針が左に動き始めます。この場合は、294 度の左 10 度、つまり交差角 284 度で、指針をもう一度インターセプトします。指針が再び中心に来たら、294 度の左に 5 度、つまり 289 度の WCA を設定します。この WCA でうまくいけば、指針は中心にとどまるはずです。中心からそれるようであれば、WCA を小さくして同じプロセスを繰り返し、針を中心に戻すようにしてください。 このテクニックは「ブラケット法」と呼ばれるもので、プロのパイロットも、これに少し改良を加えた方法で VOR やローカライザの補正を行っています。
このテクニックを練習しておけば、後々、飛行中に恥をかかずに済みますよ。ローカライザの針が計器の端まで振れるなどという事態は、ぜひとも避けたいですからね。もしそうなると、乗客は決まって、「さっきからカチカチ鳴っているのは何だい。ウィンカーがつけっぱなしじゃないの」なんて聞いてくるものです。
では、[このレッスンを開始する] をクリックして、ILS アプローチについて今学習したことを練習してください。 きっと楽しんでもらえるでしょう。